Compass
Contém anúncios
4,3star
318 críticas
50 mil+
Transferências

Todos
info





Acerca desta app
Usa o sensor de campo magnético para converter seu dispositivo em uma bússola. Não precisa estar nivelado. Norte magnético e agulhas norte verdadeiro.
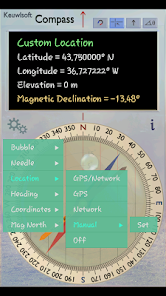
A localização é necessária para determinar a declinação magnética - a diferença entre o norte magnético e o norte verdadeiro (daí a permissão ACCESS_FINE_LOCATION). Se o local do GPS / rede não estiver disponível ou desativado, o local ainda poderá ser inserido manualmente.
Normalmente, uma bússola precisa estar nivelada para obter a leitura correta, mas este aplicativo usa a leitura do acelerômetro para converter a leitura do campo magnético novamente no plano horizontal. Se você preferir que ele atue como uma bússola real (que exige estar nivelada para uma leitura correta), em Configurações> Norte Mag, selecione o norte magnético para apontar para o campo máximo no plano do dispositivo.
Além disso:
• Bolha de olho de boi na bússola para mostrar como está nivelado.
• Medidores de rotação e inclinação.
• Calibrar opção de nível de bolha.
• Cabeçalho em notação de azimute ou quadrante.
• Força e inclinação do campo magnético.
• Disco rotativo com linhas orientadoras.
• Localização GPS / Rede - Latitude, Longitude e Elevação (o GPS pode consumir muita bateria, portanto, só é medido continuamente quando a exibição da localização é exibida. Caso contrário, apenas uma leitura é feita a partir da qual a declinação magnética é determinada).
Seu dispositivo deve ter um sensor de campo magnético para que este aplicativo funcione. A direção do campo magnético pode ser afetada por material ferromagnético próximo - Portanto, mova-se para uma área limpa e remova qualquer revestimento metálico que possa interferir no sensor. Alguns sensores podem ser magnetizados ou obter um deslocamento, resultando em leituras falsas - girar o dispositivo em torno de cada um dos três eixos pode às vezes ajudar. Os resultados dependem da qualidade do sensor magnético, portanto, use apenas para indicação.
A localização é necessária para determinar a declinação magnética - a diferença entre o norte magnético e o norte verdadeiro (daí a permissão ACCESS_FINE_LOCATION). Se o local do GPS / rede não estiver disponível ou desativado, o local ainda poderá ser inserido manualmente.
Normalmente, uma bússola precisa estar nivelada para obter a leitura correta, mas este aplicativo usa a leitura do acelerômetro para converter a leitura do campo magnético novamente no plano horizontal. Se você preferir que ele atue como uma bússola real (que exige estar nivelada para uma leitura correta), em Configurações> Norte Mag, selecione o norte magnético para apontar para o campo máximo no plano do dispositivo.
Além disso:
• Bolha de olho de boi na bússola para mostrar como está nivelado.
• Medidores de rotação e inclinação.
• Calibrar opção de nível de bolha.
• Cabeçalho em notação de azimute ou quadrante.
• Força e inclinação do campo magnético.
• Disco rotativo com linhas orientadoras.
• Localização GPS / Rede - Latitude, Longitude e Elevação (o GPS pode consumir muita bateria, portanto, só é medido continuamente quando a exibição da localização é exibida. Caso contrário, apenas uma leitura é feita a partir da qual a declinação magnética é determinada).
Seu dispositivo deve ter um sensor de campo magnético para que este aplicativo funcione. A direção do campo magnético pode ser afetada por material ferromagnético próximo - Portanto, mova-se para uma área limpa e remova qualquer revestimento metálico que possa interferir no sensor. Alguns sensores podem ser magnetizados ou obter um deslocamento, resultando em leituras falsas - girar o dispositivo em torno de cada um dos três eixos pode às vezes ajudar. Os resultados dependem da qualidade do sensor magnético, portanto, use apenas para indicação.
Atualizada a
A segurança começa com a compreensão da forma como os programadores recolhem e partilham os seus dados. As práticas de privacidade e segurança dos dados podem variar consoante a sua utilização, região e idade. O programador forneceu estas informações e pode atualizá-las ao longo do tempo.

Nenhum dado é partilhado com terceiros
Saiba mais sobre como os programadores declaram a partilha

Esta app pode recolher estes tipos de dados
Atividade de apps e Desempenho e informações da app

Os dados são encriptados em trânsito

Não é possível eliminar os dados
Classificações e críticas
4,3
299 críticas

Um utilizador do Google
- Denunciar como impróprio
31 de outubro de 2016
Good
1 pessoa considerou esta crítica útil
Um utilizador do Google
- Denunciar como impróprio
25 de fevereiro de 2016
Maravilhoso
3 pessoas consideraram esta crítica útil
Novidades
v1.30 Updated to use newer code libraries to better target and run reliably on devices in 2024.





