
Robot Calibration by SprutCAM
5,0star
10 отзывов
50+
(количество скачиваний)

3+
info








Описание
Калибровка робота с помощью MachineMaker 2.0
Приложение для автоматической передачи данных о положении инструментов в MachineMaker 2.0.
Robot Сalibration поддерживает калибровку TCP для следующих типов роботов:
- Фанук
- Кука
- Тормах
- Борунте
- СРБ
- Денсо
- Добот
- Эстун
- Хивин
- Хюндай
- Мотоман
- Ньюкер
- Манутек
- Начи
- ОТЦ Дайхен
- Турин
Как это работает:
- Отсканируйте QR-код в MachineMacker 2.0, чтобы связать приложение с проектом;
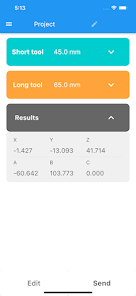
- Соберите данные TCP робота. Сначала коротким инструментом, затем длинным;
- Введите показания XYZ. Введите длину вылета инструментов из шпинделя в миллиметрах.
Нажмите «Рассчитать»
Приложение для автоматической передачи данных о положении инструментов в MachineMaker 2.0.
Robot Сalibration поддерживает калибровку TCP для следующих типов роботов:
- Фанук
- Кука
- Тормах
- Борунте
- СРБ
- Денсо
- Добот
- Эстун
- Хивин
- Хюндай
- Мотоман
- Ньюкер
- Манутек
- Начи
- ОТЦ Дайхен
- Турин
Как это работает:
- Отсканируйте QR-код в MachineMacker 2.0, чтобы связать приложение с проектом;
- Соберите данные TCP робота. Сначала коротким инструментом, затем длинным;
- Введите показания XYZ. Введите длину вылета инструментов из шпинделя в миллиметрах.
Нажмите «Рассчитать»
Последнее обновление
Чтобы контролировать безопасность, нужно знать, как разработчики собирают ваши данные и передают их третьим лицам. Методы обеспечения безопасности и конфиденциальности могут зависеть от того, как вы используете приложение, а также от вашего региона и возраста. Информация ниже предоставлена разработчиком и в будущем может измениться.

Данные не передаются третьим сторонам.
Подробнее о том, как разработчики заявляют о передаче данных…

Данные не собираются
Подробнее о том, как разработчики заявляют о сборе данных…
Оценки и отзывы
5,0
10 отзывов

6ulka
- Пожаловаться
9 апреля 2024 г.
Good app
2 человека отметили этот отзыв как полезный.
Поддержка приложения
О разработчике
SPRUTCAM TECH LIMITED
hazrat@sprutcam.io
9 Aiolou & Panagioti Diomidous
Limassol 3020
Cyprus
+357 97 620294