
HyperIMU
Купувања во апликација
4,5star
31,6 илј. рецензии
1 мил.+
Преземања

Сите
info



За апликацијава
Да го претвориме вашиот уред во моќен IMU (единица за инерцијално мерење).
Снимете податоци од сите сензори од вашиот уред и развијте ваши сопствени алгоритми, искористувајќи ја мрежната или офлајн обработка на сигналот.
HyperIMU ги изложува сите податоци на сензорите преку мрежни протоколи (TCP, UDP) или ги собира во датотека за офлајн обработка.
Со HyperIMU исто така можете да ги гледате графиконите за сигнали во времето на траење.
Карактеристики:
★ Стриминг на податоци CSV или JSON
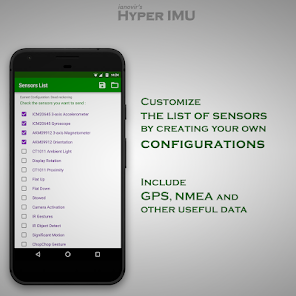
List Целосно конфигуриран список на сензори за проследување
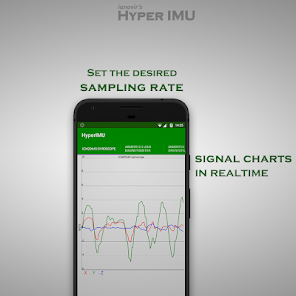
★ Прилагодена стапка на земање примероци
★ Вклучувајќи ги податоците за GPS и GPS NMEA 0183
View Прегледувач на сигнални графикони во реално време
★ Протоколи за мрежен поток: UDP, TCP
★ .Складирање на датотеки ССВ
-Интерфејс за употреба
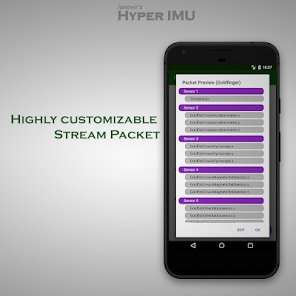
★ Пакет за одлично прилагодување на поток
★ Постојана врска
Преземете го кодот Python на HIMU-серверот тука: https://github.com/ianovir/HIMUServer
Помошта може да ја најдете тука: https://github.com/ianovir/HIMUServer/blob/master/README.txt
За извештаи и предлози за грешки, контактирајте го развивачот преку е-пошта.
Снимете податоци од сите сензори од вашиот уред и развијте ваши сопствени алгоритми, искористувајќи ја мрежната или офлајн обработка на сигналот.
HyperIMU ги изложува сите податоци на сензорите преку мрежни протоколи (TCP, UDP) или ги собира во датотека за офлајн обработка.
Со HyperIMU исто така можете да ги гледате графиконите за сигнали во времето на траење.
Карактеристики:
★ Стриминг на податоци CSV или JSON
List Целосно конфигуриран список на сензори за проследување
★ Прилагодена стапка на земање примероци
★ Вклучувајќи ги податоците за GPS и GPS NMEA 0183
View Прегледувач на сигнални графикони во реално време
★ Протоколи за мрежен поток: UDP, TCP
★ .Складирање на датотеки ССВ
-Интерфејс за употреба
★ Пакет за одлично прилагодување на поток
★ Постојана врска
Преземете го кодот Python на HIMU-серверот тука: https://github.com/ianovir/HIMUServer
Помошта може да ја најдете тука: https://github.com/ianovir/HIMUServer/blob/master/README.txt
За извештаи и предлози за грешки, контактирајте го развивачот преку е-пошта.
Ажуриранa на
Безбедноста започнува со разбирање како програмерите ги прибираат и споделуваат вашите податоци. Праксата во однос на приватноста и заштитата на податоците може да се разликува според користењето, регионот и вашата возраст. Програмерот ги обезбедил информацииве и може да ги ажурира во иднина.

Не се споделуваат податоци со трети страни
Дознајте повеќе како програмерите изјавуваат споделување податоци

Оваа апликација може да ги прибира овие типови податоци
Активност во апликациите и Податоци за апликација и изведба

Податоците се шифрираат при префрлување
Оцени и рецензии
4,5
31,1 илј. рецензии
Што има ново
- Minor improvements







