Aruco MarkerMapper
1 K+
Descargas

Apto para todo público
info
Acerca de esta app
Implementa el papel de "mapeo y localización de los marcadores planas" La investigación publicada en Reconocimiento de Patrones, Volumen 73, enero de 2018, páginas 158-171.
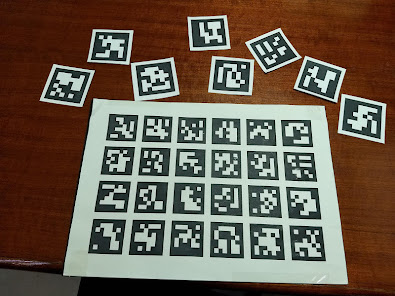
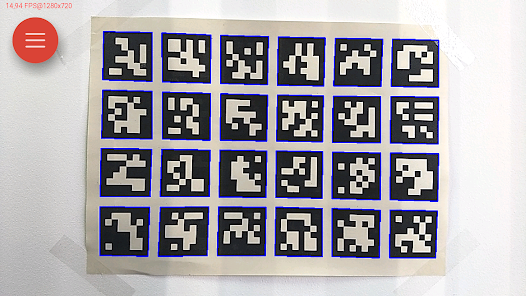
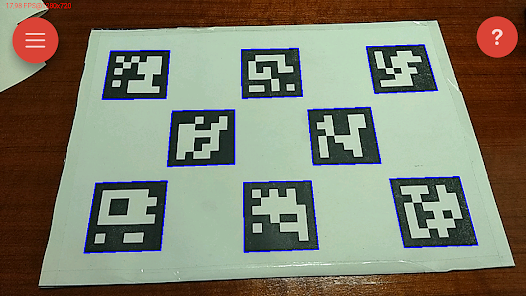
El método puede ser utilizado para la localización de la cámara a partir de marcadores al cuadrado. Coloque los marcadores en su entorno y utilizar la aplicación para crear un mapa que puede ser utilizado por el robot.
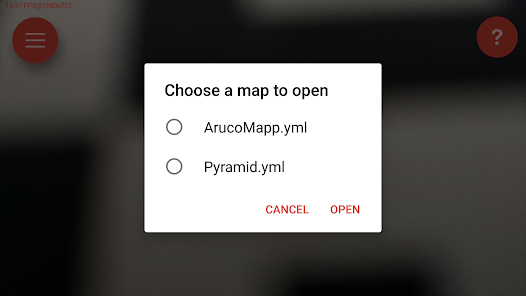
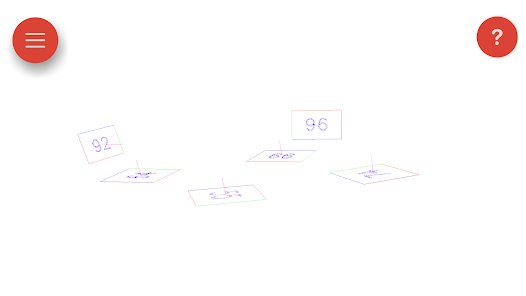
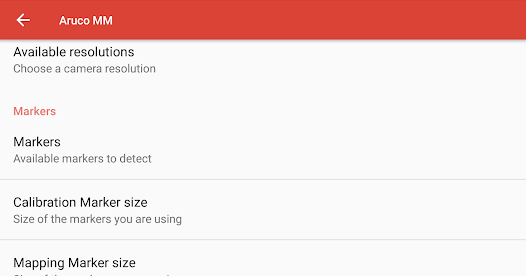
En primer lugar, debe calibrar la cámara. A continuación, establezca sus marcadores en el medio ambiente y utilizar la aplicación para tomar fotos de ellos. La aplicación va a generar una reconstrucción 3D de los marcadores. Puede visualizar el mapa de marcadores y enviarlo por correo electrónico a su auto para usarlo más adelante en otro dispositivo, como su robot.
El método puede ser utilizado para la localización de la cámara a partir de marcadores al cuadrado. Coloque los marcadores en su entorno y utilizar la aplicación para crear un mapa que puede ser utilizado por el robot.
En primer lugar, debe calibrar la cámara. A continuación, establezca sus marcadores en el medio ambiente y utilizar la aplicación para tomar fotos de ellos. La aplicación va a generar una reconstrucción 3D de los marcadores. Puede visualizar el mapa de marcadores y enviarlo por correo electrónico a su auto para usarlo más adelante en otro dispositivo, como su robot.
Actualización
El primer paso de la seguridad es comprender cómo los desarrolladores recopilan y comparten tus datos. Las prácticas de privacidad y seguridad de datos pueden variar en función del uso de la app, la región y la edad. El desarrollador proporcionó esta información y podría actualizarla con el tiempo.

No se comparten datos con terceros
Más información sobre cómo los desarrolladores declaran el uso compartido

No se recopilan datos
Más información sobre cómo los desarrolladores declaran la recopilación
Novedades
Bug solved of the previous version.