
HyperIMU
Compres des de l'aplicació
4,7star
43,3 k ressenyes
1 M+
Baixades

Per a tots els públics
info



Sobre l'aplicació
Convertim el vostre dispositiu en una potent IMU (Unitat de Mesura Inercial).
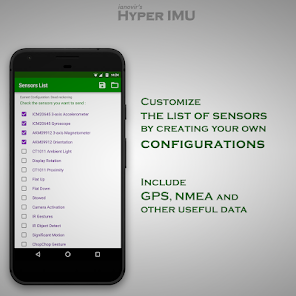
Captureu dades de tots els sensors del vostre dispositiu i desenvolupeu els vostres propis algoritmes aprofitant un processament de senyal en línia o fora de línia.
HyperIMU exposa les dades de tots els sensors mitjançant protocols de xarxa (TCP, UDP) o les recopila en un fitxer per a un processament fora de línia.
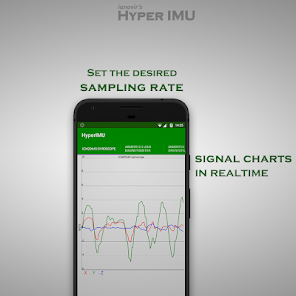
Amb HyperIMU també podeu veure els gràfics de senyals en temps d'execució.
Funcions:
★ Transmissió de dades CSV o JSON
★ Llista de sensors completament configurable per transmetre
★ Taxa de mostreig personalitzable
★ Incloent dades GPS i GPS NMEA 0183
★ Visor de gràfics de senyals en temps real
★ Protocols de flux de xarxa: UDP, TCP
★ Emmagatzematge de fitxers CSV
★ Interfície fàcil d'utilitzar
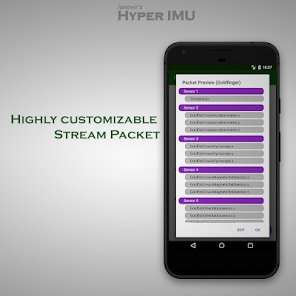
★ Paquet de transmissió molt personalitzable
★ Connexió persistent
Baixeu-vos el codi Python del servidor HIMU aquí: https://github.com/ianovir/HIMUServer
Podeu trobar l'ajuda aquí: https://github.com/ianovir/HIMUServer/blob/master/README.txt
Per obtenir informes i suggeriments d’errors, poseu-vos en contacte amb el desenvolupador per correu electrònic.
Captureu dades de tots els sensors del vostre dispositiu i desenvolupeu els vostres propis algoritmes aprofitant un processament de senyal en línia o fora de línia.
HyperIMU exposa les dades de tots els sensors mitjançant protocols de xarxa (TCP, UDP) o les recopila en un fitxer per a un processament fora de línia.
Amb HyperIMU també podeu veure els gràfics de senyals en temps d'execució.
Funcions:
★ Transmissió de dades CSV o JSON
★ Llista de sensors completament configurable per transmetre
★ Taxa de mostreig personalitzable
★ Incloent dades GPS i GPS NMEA 0183
★ Visor de gràfics de senyals en temps real
★ Protocols de flux de xarxa: UDP, TCP
★ Emmagatzematge de fitxers CSV
★ Interfície fàcil d'utilitzar
★ Paquet de transmissió molt personalitzable
★ Connexió persistent
Baixeu-vos el codi Python del servidor HIMU aquí: https://github.com/ianovir/HIMUServer
Podeu trobar l'ajuda aquí: https://github.com/ianovir/HIMUServer/blob/master/README.txt
Per obtenir informes i suggeriments d’errors, poseu-vos en contacte amb el desenvolupador per correu electrònic.
Data d'actualització:
La seguretat comença per entendre com els desenvolupadors recullen i comparteixen les teves dades. Les pràctiques de privadesa i seguretat de les dades poden variar segons l'ús que es fa de l'aplicació, la regió i l'edat. El desenvolupador ha proporcionat aquesta informació i és possible que l'actualitzi al llarg del temps.

No es comparteixen dades amb tercers
Més informació sobre com els desenvolupadors declaren la compartició de dades

Aquesta aplicació pot recollir aquests tipus de dades
Activitat en aplicacions i Informació i rendiment de l'aplicació

Les dades s'encripten mentre estan en trànsit
Puntuacions i ressenyes
4,7
42,4 k ressenyes
Assistència de l'aplicació
Sobre el desenvolupador
Sebastiano Campisi
ianovir@gmail.com
Via Emilia Levante, 134
40139 Bologna
Italy








