
QGroundControl
4.3star
528 review
50K+
Mga Download

Lahat
info



Tungkol sa app na ito
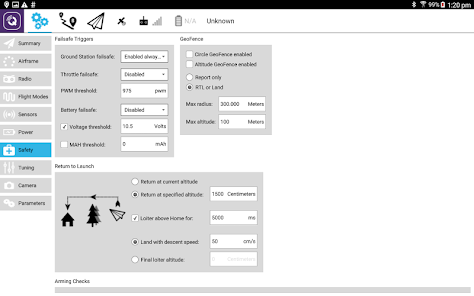
Ang QGroundControl ay nagbibigay ng ganap na pagkontrol at pagsasaayos ng flight para sa mga sasakyang pinapatakbo ng ArduPilot o PX4 Pro. Ang layunin para sa QGroundControl ay pinahusay na kadalian ng paggamit para sa mga bagong gumagamit pati na rin ang mataas na dulo tampok na suporta para sa mga karanasan na mga gumagamit.
Mga tampok ng QGroundControl:
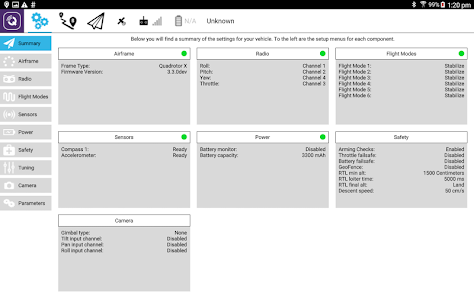
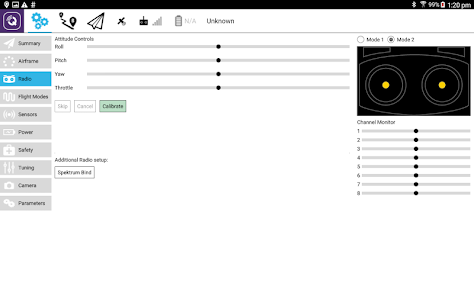
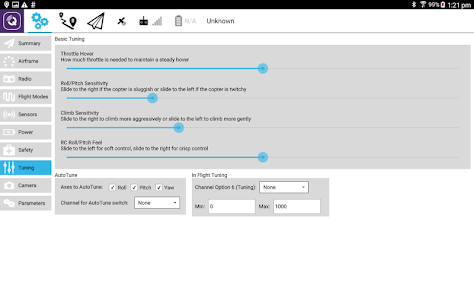
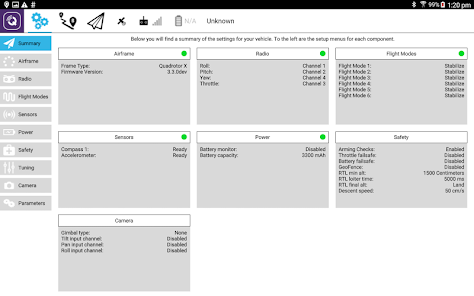
- Buong configuration ng suporta para sa mga sasakyan na tumatakbo PX4 Pro at ArduPilot (ArduCopter, ArduPlane, ArduRover, ArduSub) firmware
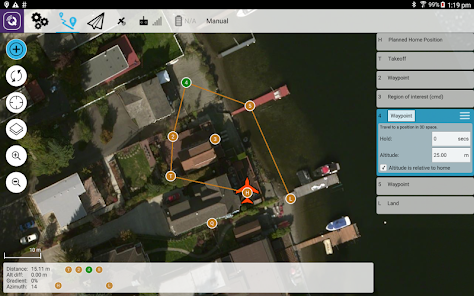
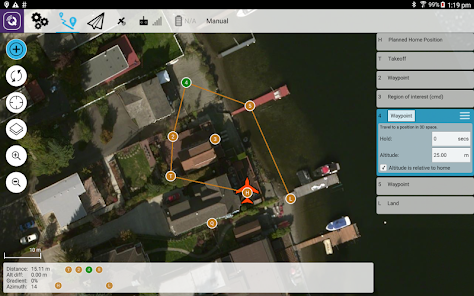
- Pagpaplano ng misyon para sa autonomous flight
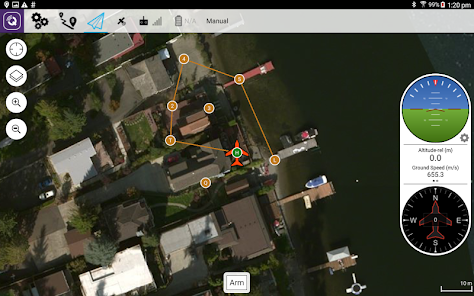
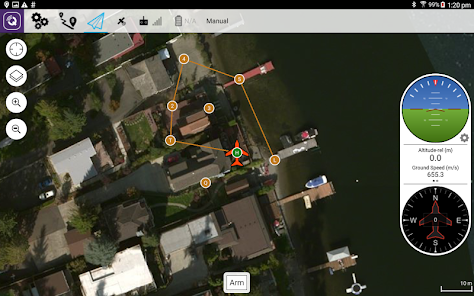
- Ipakita ang display ng mapa na nagpapakita ng posisyon ng sasakyan, flight track, waypoint at mga instrumento ng sasakyan
- Pag-stream ng video na may mga overlay ng display ng instrumento
- Suporta ng flight para sa anumang sasakyang may kakayahang MAVLink
Available din ang QGroundControl para sa Windows, MacOS, Linux at iOS.
Mga Tala sa Paglabas
Opisyal na Site ng QGroundControl
Documentation
Suporta
Mga tampok ng QGroundControl:
- Buong configuration ng suporta para sa mga sasakyan na tumatakbo PX4 Pro at ArduPilot (ArduCopter, ArduPlane, ArduRover, ArduSub) firmware
- Pagpaplano ng misyon para sa autonomous flight
- Ipakita ang display ng mapa na nagpapakita ng posisyon ng sasakyan, flight track, waypoint at mga instrumento ng sasakyan
- Pag-stream ng video na may mga overlay ng display ng instrumento
- Suporta ng flight para sa anumang sasakyang may kakayahang MAVLink
Available din ang QGroundControl para sa Windows, MacOS, Linux at iOS.
Mga Tala sa Paglabas
Opisyal na Site ng QGroundControl
Documentation
Suporta
Na-update noong
Nagsisimula ang kaligtasan sa pag-unawa kung paano kinokolekta at ibinabahagi ng mga developer ang iyong data. Posibleng mag-iba ang mga kagawian sa privacy at seguridad ng data batay sa iyong paggamit, rehiyon, at edad. Ang developer ang nagbigay ng impormasyong ito at posibleng i-update niya ito sa paglipas ng panahon.


Mga rating at review
4.3
464 na review





