
GnssLogger App
4,4star
232 рецензијe
10 хиљ.+
Преузимања

Сви
info



О овој апликацији
Гоогле-ов ГнссЛоггер омогућава детаљну анализу и евидентирање свих врста података о локацији и сензорима као што су ГПС (Глобал Поситионинг Систем), мрежна локација и други подаци сензора. Долази са следећим карактеристикама:
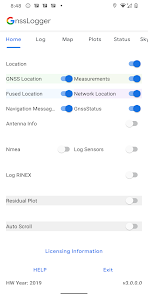
ХОМЕ ТАБ:
● Контролишите различите евиденције података, попут сирових ГНСС мерења, ГнссСтатус, НМЕА, навигационих порука, података сензора и РИНЕКС евиденција.
ЛОГ ТАБ:
● Погледајте све податке о локацији и необрађене мере.
● Контролишите евиденцију ван мреже помоћу „Старт Лог“, „Стоп & Сенд“ и „Тимед Лог“.
● Омогућите евидентирање одређених ставки помоћу одговарајућих прекидача на картици Почетна.
● Избришите постојеће датотеке евиденције са диска.
КАРТА КАРТЕ:
● Визуелизујте на ГооглеМап-у локацију коју пружа ГПС чипсет, добављач мрежне локације (НЛП), осигурач локације осигурача (ФЛП) и израчуната позиција пондерираног најмањег квадрата (ВЛС).
● Пребацујте се између различитих приказа мапе и типова локација.
КАРТИЦА ПАРЦЕЛА:
● Визуелизујте ЦН0 (јачина сигнала), ПР (псеудо опсег) Преостали и ПРР (псеудо опсег) Преостали у односу на време.
КАРТИЦА СТАТУСА:
● Погледајте детаљне информације о свим видљивим сателитима ГНСС (Глобал Навигатион Сателлите Систем), као што су ГПС, Беидоу (БДС), КЗСС, ГАЛ (Галилео), ГЛО (ГЛОНАСС) и ИРНСС.
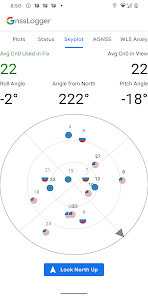
СКИПЛОТ ТАБ:
● Визуелизујте податке свих видљивих ГНСС сателита помоћу скиплата.
● Погледајте просечни ЦН0 свих приказаних сателита и оних коришћених у поправци.
АГНСС ТАБ:
● Експериментишите са потпомогнутим ГНСС функционалностима.
КАРТИЦА ВЛС анализе:
● Погледајте положај пондерираног најмањег квадрата, брзину и њихове несигурности израчунате на основу сирових ГНСС мерења.
● Упоредите ВЛС резултате са пријављеним вредностима ГНСС чипсета.
ХОМЕ ТАБ:
● Контролишите различите евиденције података, попут сирових ГНСС мерења, ГнссСтатус, НМЕА, навигационих порука, података сензора и РИНЕКС евиденција.
ЛОГ ТАБ:
● Погледајте све податке о локацији и необрађене мере.
● Контролишите евиденцију ван мреже помоћу „Старт Лог“, „Стоп & Сенд“ и „Тимед Лог“.
● Омогућите евидентирање одређених ставки помоћу одговарајућих прекидача на картици Почетна.
● Избришите постојеће датотеке евиденције са диска.
КАРТА КАРТЕ:
● Визуелизујте на ГооглеМап-у локацију коју пружа ГПС чипсет, добављач мрежне локације (НЛП), осигурач локације осигурача (ФЛП) и израчуната позиција пондерираног најмањег квадрата (ВЛС).
● Пребацујте се између различитих приказа мапе и типова локација.
КАРТИЦА ПАРЦЕЛА:
● Визуелизујте ЦН0 (јачина сигнала), ПР (псеудо опсег) Преостали и ПРР (псеудо опсег) Преостали у односу на време.
КАРТИЦА СТАТУСА:
● Погледајте детаљне информације о свим видљивим сателитима ГНСС (Глобал Навигатион Сателлите Систем), као што су ГПС, Беидоу (БДС), КЗСС, ГАЛ (Галилео), ГЛО (ГЛОНАСС) и ИРНСС.
СКИПЛОТ ТАБ:
● Визуелизујте податке свих видљивих ГНСС сателита помоћу скиплата.
● Погледајте просечни ЦН0 свих приказаних сателита и оних коришћених у поправци.
АГНСС ТАБ:
● Експериментишите са потпомогнутим ГНСС функционалностима.
КАРТИЦА ВЛС анализе:
● Погледајте положај пондерираног најмањег квадрата, брзину и њихове несигурности израчунате на основу сирових ГНСС мерења.
● Упоредите ВЛС резултате са пријављеним вредностима ГНСС чипсета.
Ажурирано:
Предуслов безбедности је да разумете како програмери прикупљају и деле ваше податке. Праксе за приватност и безбедност података могу да се разликују у зависности од коришћења, региона и узраста. Програмер је пружио те информације и може да их ажурира током времена.

Подаци се не деле са трећим странама
Сазнајте више о томе како програмери објављују дељење

Нема прикупљених података
Сазнајте више о томе како програмери објављују прикупљање
Оцене и рецензије
4,4
228 рецензија
Шта је ново
• Updated raw log to include Location.isMock
• Fixed logging Automatic Gain Control to file and UI on Android 13 and up
• “Force Full Tracking” option
• “Keep Screen On” option
• Updated ground truth options for residual plot
• Bug fixes and performance improvements
• Fixed logging Automatic Gain Control to file and UI on Android 13 and up
• “Force Full Tracking” option
• “Keep Screen On” option
• Updated ground truth options for residual plot
• Bug fixes and performance improvements









